MODUL 4 : PROJECT
Kontrol Tanaman Lidah Buaya pada Green House Menggunakan Sensor Flame, Soil Moisture Sensor, UV Sensor, Touch Sensor, dan PH Meter Sensor
1. Pendahuluan [Kembali]
2. Tujuan [Kembali]
- Membuat prototype aplikasi Kontrol Tanaman Lidah Buaya yang dapat mempermudah dalam mengontrol kelembaban tanah dan kecukupan air pada tanaman lidah buaya
- Mengaplikasikan konsep-konsep PWM, ADC, dan teori komunikasi mikrokontroller yang telah dipelajari saat praktikum
- Merangkai dan menguji aplikasi output pada mikrokontroller Arduino
- Merangkai dan menguji input pada mikrokontroller Arduino
- Merangkai dan menguji I/O pada mikrokontroller Arduino
- Merangkai dan menguji aplikasi output dalam bentuk prototype
3. Alat dan Bahan [Kembali]
Generator


1) Resistor

Spesifikasi:

2) Dioda


3) Op-Amp 741

Spesifikasi dari IC UA741 meliputi berikut ini:
• Supply tegangan ±18V
• Perbedaan tegangan input daya adalah ±15V
• Rasio penolakan mode umum adalah 90dB
• Amplifikasi tegangan diferensial adalah 200V/mv
• Arus supply adalah 1.5mA
• Pin ini dapat diakses dalam berbagai paket seperti paket 8-Pin PDIP, VSSOP, & SOIC
Komponen Input:
1. Sensor Soil Mosture

2. Touch sensor



4. UV Sensor


5. PH Meter

- Heating Voltage : 5 +- 0.2V (AC middot DC)
- Konsumsi Arus : 5 ~ 10mA
- Detectable Concetration Range : PH0-14
- Detection Temperature Range : 0 ~ 80°C
- Response Time : 55s
- Settling Time : 60s
- Componen Power : 0.5W
- Antarmuka : Analog
- Suhu Operasi : -10 ~ 50°C
- Kelembapan : 95% RH
- Dimensi : 42 x 32 x 20mm
6.Relay

Spesifikasi Relay:

7. Motor DC

Spesifikasi item:
o Tanpa kecepatan beban 12000 ± 15% rpm
o Tidak ada arus beban =280mA
o Tegangan operasi 1.5 - 9 VDC
o Mulai Torsi =250g.cm (menurut blade yang dikembangkan sendiri)
o mulai saat ini =5A
o Resistansi Isolasi di atas 10O antara casing dan terminal DV 100V
o Arah Rotasi CW: Terminal [+] terhubung ke catu daya positif, terminal [-] terhubung ke nagative
o daya, searah jarum jam dianggap oleh arah poros keluaran
o celah poros 0,05-0,35mm
8. IC Op Amp


9. Potensiometer







3. Relay


Spesifikasi:


4. Dasar Teori [Kembali]
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).

· Duty Cycle = tON / ttotal
· tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
· tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah (low atau 0)
· ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga dengan “periode satu gelombang”
Pada board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin tersebut merupakan pin yang bisa difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini, bisa dilakukan dengan perintah analogWrite();.
PWM pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu bernilai 0 volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah dari 0 hingga 255, atau 50% dari 255), maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 x 255 atau 64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik.
2. ADC (Analog to Digital Converter)
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt. Pada Arduino, menggunakan pin analog input yang diawali dengan kode A (A0- A5 pada Arduino Uno). Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin);.
3. Mikrokontroler

Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, serta tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang ke adaptor DC atau baterai untuk menjalankannya.
Setiap 14 pin digital pada arduino uno dapat digunakan sebagai input dan output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Fungsi – fungsi tersebut beroperasi di tegangan 5 volt. Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up (terputus secara default) 20-50 kOhm.
4. Komunikasi
4.1. Universal Asynchronous Receiver Transmitter (UART)
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.

Cara Kerja Komunikasi UART :
Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudian ditransfer secara parallel ke data bus penerima.
4.2. Serial Peripheral Interface (SPI)
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi serial synchrounous kecepatan tinggi yang dimiliki oleh ATmega 328. Komunikasi SPI membutuhkan 3 jalur yaitu MOSI, MISO, dan SCK. Melalui komunikasi ini data dapat saling dikirimkan baik antara mikrokontroler maupun antara mikrokontroler dengan peripheral lain di luar mikrokontroler.
· MOSI : Master Output Slave Input artinya jika dikonfigurasi sebagai master maka pin MOSI sebagai output tetapi jika dikonfigurasi sebagai slave maka pin MOSI sebagai input.
· MISO : Master Input Slave Output artinya jika dikonfigurasi sebagai master maka pin MISO sebagai input tetapi jika dikonfigurasi sebagai slave maka pin MISO sebagai output.
· SCLK : Clock jika dikonfigurasi sebagai master maka pin CLK berlaku sebagai output tetapi jika dikonfigurasi sebagai slave maka pin CLK berlaku sebagai input.
· SS/CS : Slave Select / Chip Select adalah jalur master memilih slave mana yang akan dikirimkan data.

Cara Kerja Komunikasi SPI :
Sinyal clock dialirkan dari master ke slave yang berfungsi untuk sinkronisasi. Master dapat memilih slave mana yang akan dikirimkan data melalui slave select, kemudian data dikirimkan dari master ke slave melalui MOSI. Jika master butuh respon data maka slave akan mentransfer data ke master melalui MISO.
4.3. Inter Integrated Circuit (I2C)
Inter Integrated Circuit atau sering disebut I2C adalah standar komunikasi serial dua arah menggunakan dua saluran yang didisain khusus untuk mengirim maupun menerima data. Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang membawa informasi data antara I2C dengan pengontrolnya.

Cara Kerja Komunikasi I2C :
Pada I2C, data ditransfer dalam bentuk message yang terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1, Data Frame 2, dan kondisi Stop.
· Kondisi start dimana saat pada SDA beralih dari logika high ke low sebelum SCL.
· Kondisi stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL.
· R/W bit berfungsi untuk menentukan apakah master mengirim data ke slave atau meminta data dari slave. (logika 0 = mengirim data ke slave, logika 1 = meminta data dari slave)
· ACK/NACK bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telah diterima receiver.
5. LCD

LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. Adapun fitur yang disajikan dalam LCD ini adalah terdiri dari 16 karakter dan 2 baris, mempunyai 192 karakter tersimpan, terdapat karakter generator terprogram, dapat dialamati dengan mode 4 bit dan 8 bit, dilengkapi dengan back light.
Proses inisialisasi pin arduino yang terhubung ke pin LCD RS, Enable, D4, D5, D6, dan D7, dilakukan dalam baris LiquidCrystal (2, 3, 4, 5, 6, 7), dimana LCD merupakan variabel yang dipanggil setiap kali intruksi terkait LCD akan digunakan.
Pada Proyek Akhir ini LCD dapat menampilkan karakternya dengan menggunakan library yang bernama LiquidCrystal. Berikut ada beberapa fungsifungsi dari library LCD:
- begin() Untuk begin() digunakan dalam inisialisasi interface ke LCD dan mendefinisikan ukuran kolom dan baris LCD. Pemanggilan begin() harus dilakukan terlebih dahulu sebelum memanggil instruksi lain dalam library LCD. Untuk syntax penulisan instruksi begin() ialah sebagai berikut. lcd.begin(cols,rows) dengan lcd ialah nama variable, cols jumlah kolom LCD, dan rows jumlah baris LCD.
- clear() Instruksi clear() digunakan untuk membersihkan pesan text. Sehingga tidak ada tulisan yang ditapilkan pada LCD.
- setCursor() 19 Instruksi ini digunakan untuk memposisikan cursor awal pesan text di LCD. Penulisan syntax setCursor() ialah sebagai berikut. lcd.setCursor(col,row) dengan lcd ialah nama variable, col kolom LCD, dan row baris LCD.
- print() Sesuai dengan namanya, instruksi print() ini digunakan untuk mencetak, menampilkan pesan text di LCD. Penulisan syntax print() ialah sebagai berikut.lcd.print(data) dengan lcd ialah nama variable, data ialah pesan yang ingin ditampilkan.
6. Resistor
Resistor merupakan komponen elektronika dasar yang digunakan untuk membatasi jumlah arus yang mengalir dalam satu rangkaian.Sesuai dengan namanya, resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Resistor memiliki simbol seperti gambar dibawah ini :

Simbol Resistor
Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan Hukum OHM :

Dimana V adalah tegangan, I adalah kuat arus, dan R adalah Hambatan.
Di dalam resistor, terdapat ketentuan untuk membaca nilai resistor yang diwakili dengan kode warna dengan ketentuan di bawah ini :


Sebagian besar resistor yang kita lihat memiliki empat pita berwarna . Oleh karena itu ada cara membacanya seperti ketentuan dibawah ini :
1. Dua pita pertama dan kedua menentukan nilai dari resistansi
2. Pita ketiga menentukan faktor pengali, yang akan memberikan nilai resistansi.
3. Dan terakhir, pita keempat menentukan nilai toleransi.
Rumus Resistor:
Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
Paralel: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
7. Motor DC

Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.

Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
8. Motor Servo

Motor servo adalah jenis motor listrik yang dirancang untuk memberikan output yang presisi dalam menyelesaikan pergerakan tertentu. Motor ini dilengkapi dengan kontroler yang memungkinkan presisi tinggi dalam mengatur posisi atau sudut rotor. Prinsip kerja motor servo didasarkan pada umpan balik atau feedback yang terus-menerus dari posisi rotor.
Prinsip kerja motor servo:
1. Umpan Balik (Feedback): Motor servo menggunakan sensor umpan balik, seperti potensiometer, enkoder, atau resolver, untuk terus memonitor posisi atau sudut rotor.
2. Kontroler:
· Kontroler servo menerima sinyal perintah untuk mencapai posisi tertentu.
· Kontroler membandingkan posisi aktual (yang diberikan oleh sensor umpan balik) dengan posisi yang diminta.
3. Error Signal:
· Jika terdapat perbedaan antara posisi aktual dan yang diminta, tercipta sinyal kesalahan (error signal).
4. Sinyal Penggerak (Drive Signal):
· Kontroler menghasilkan sinyal penggerak yang disesuaikan berdasarkan error signal.
· Sinyal penggerak mengontrol daya yang disuplai ke motor untuk mengoreksi perbedaan posisi.
5. Pergerakan Presisi:
· Motor servo merespons dengan mengubah posisi rotor untuk mengurangi error posisi.
· Proses ini berlanjut sampai posisi yang diminta tercapai.
Motor servo sering digunakan dalam aplikasi yang membutuhkan presisi tinggi, seperti robotika, peralatan CNC (Computer Numerical Control), peralatan audio profesional, dan banyak lagi. Keunggulan motor servo meliputi kemampuan untuk mengontrol kecepatan, torsi, dan posisi dengan sangat presisi, membuatnya ideal untuk aplikasi yang memerlukan akurasi dan kontrol yang tinggi.
9. Sensor Flame

Flame sensor atau sensor api merupakan alat pendeteksi kebakaran melalui adanya nyala api yang muncul secara tiba-tiba. Besarnya nyala api yang terdeteksi yaitu nyala api dengan panjang gelombang 760 nm hingga 1.100 nm. Transduser yang digunakan dalam mendeteksi nyala api yaitu infrared. Biasanya sensor api ini digunakan pada ruangan di perkantoran, apartemen atau perhotelan. Namun sering juga digunakan dalam pertandingan robot. Sensor ini berfungsi sebagai mata dari robot untuk mendeteksi nyala api. Dengan meletakkan sensor api sebagai mata, diharapkan robot bisa menemukan posisi lilin yang menyala. Sensor api memiliki manfaat yang cukup besar. Salah satu diantaranya yaitu bisa meminimalisir adanya alarm palsu sebagai sebuah tanda akan terjadinya kebakaran. Sensor ini dirancang khusus untuk menemukan penyerapan cahaya pada gelombang tertentu.
Jenis dan Cara Kerja Sensor Api
Prinsip kerja sensor api cukup sederhana, yaitu memanfaatkan sistem kerja metode optik. Optik yang mengandung infrared, ultraviolet atau pencitraan visual api bisa mendeteksi adanya percikan api sebagai tanda awal kebakaran. Jika terjadi reaksi percikan api yang cukup sering, maka akan terlihat emisi karbondioksida dan radiasi dari infrared. Ada empat jenis sensor api, yaitu UV Flame Detector, UV/IR Flame Detector, Multi-Spectrum IR Flame Detector (MSIR) dan Visual Imaging Detector. Berikut ini penjelasan masing-masing dari jenis dan cara kerja sensor api :
1. UV Flame Detector
Sensor api menggunakan teknologi ultraviolet sehingga bisa menanggapi radiasi spectral antara 180 nm hingga 260 nm. Tingkat sensitivitas dan respon ultraviolet termasuk baik dan cepat dalam kisaran 0 hingga 50 kaki. Sensor ini sangat sensitif terhadap hal-hal yang bermuatan listrik seperti lampu halogen, busur pengelasan dan petir.
2. UV/IR Flame Detektor
Sensor api merupakan sensor yang menggabungkan atau mengintegrasikan sensor optik ultraviolet ke dalam sensor infrared. Pengintegrasian dual band ini diharapkan bisa membuat detektor ini jauh lebih sensitif terhadap radiasi yang bersifat ultraviolet maupun infrared yang dipancarkan oleh percikan api. Selain itu, teknologi ini juga memiliki tingkat kekebalan yang lebih tinggi dengan respon yang jauh lebih baik dari teknologi sebelumnya. Oleh karena itu, selain cocok diletakkan di dalam ruangan, sensor ini juga cocok digunakan di luar ruangan yang bersifat terbuka.
3. Multi-Spectrum IR Flame Detektor (MSIR)
Sensor api ini dibuat lebih canggih dari jenis sebelumnya karena bisa memanfaatkan daerah spectral infrared secara maksimal untuk mendeteksi radiasi sumber api. Sensor jni nemiliki sensitivitas yang tinggi karena bisa menjangkau radiasi sumber api hingga 200 kaki dari sumber percikan api, baik indoor atau pun outdoor. Selain itu, teknologi ini juga memiliki kekebalan yang tinggi terhadap radiasi yang berasal dari infrared. Radiasi ini dapat muncul karena adanya sengatan listrik, adanya percikan api, muatan listrik dan juga pemicu kebakaran yang lainnya seperti material yang bersifat panas.
4. Visual Flame Imaging Detektor
Sensor api ini tergolong lebih canggih jika dibandingkan dengan tiga teknologi sebelumnya. Hal ini dikarenakan oleh tiga faktor berikut :
Pertama, teknologi ini menggunakan beberapa perangkat CCD. Biasanya perangkat CCD ini digunakan dalam kamera sirkuit tertutup.
Kedua, teknologi ini menggunakan algoritma sebagai pendeteksi dini untuk menentukan letak percikan api sebagai penyebab kebakaran. Fungsi dari algoritma yaitu menganalisis bentuk dan perkembangan api berdasarkan video yang diperoleh dari komponen CCD. Hasil analisis inilah yang akan menentukan betul tidaknya sebuah kebakaran.
Ketiga, teknologi ini tidak mendeteksi adanya kebakaran melalui muatan listrik, radiasi panas, cahaya api atau sejenisnya seperti pada ketiga teknologi sebelumnya. Oleh karena itu, sensor api visual flame imaging detector sangat cocok digunakan pada ruangan yang di dalamnya terdapat aktivitas pembakaran agar tidak terjadi alarm palsu. Grafik Respon :

10. Sensor Ultraviolet

Ultraviolet (UV) adalah gelombang elektromagnetik yang memiliki panjang gelombang sebesar 380-200 nm. Cahaya ini sulit untuk dilihat dengan mata telanjang. Cahaya ini biasanya dipancarkan oleh matahari.
Sensor cahaya ultraviolet adalah sensor cahaya yang hanya merespon perubahan intensitas cahaya ultraviolet yang mengenainya. Sensor ini menerima input dalam bentuk intensitas cahaya ultraviolet dan menghasilkan output dalam bentuk perubahan besaran listrik.
Sensor yang umum digunakan adalah UVTron. UVTron merupakan detektor ultraviolet yang terbuat dari efek metal photoelektrik yang digabung dengan efek gas campuran. UVTron dapat mendeteksi api sehingga UVTron ini juga dikenal dengan sensor api. Keunggulan dari UVTron ini adalah memiliki konsumsi arus yang rendah dan sensitifitas yang tinggi. Untuk mengakses datanya berupa input dan output berupa sinyal digital 0 atau 1.
Sensor UV-Tron akan mengeluarkan logika high (1) jika ia mendeteksi keberadaan api dan sebaliknya sensor UV-Tron akan mengeluarkan logika low (0) jika ia tidak mendeeksi api, anda bisa mengecek keluarannya dengan multimeter analog.


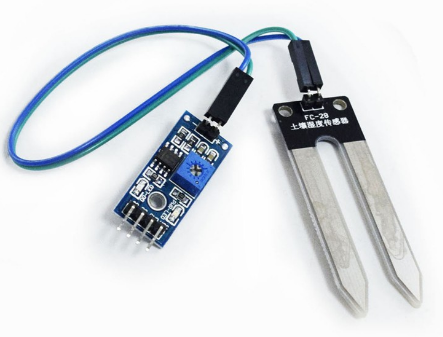
11. Sensor Soil Moisture

BAGIAN BAGIAN PIN SENSOR

CARA KERJA SENSOR
Pada saat diberikan catudaya dan disensingkan pada tanah, maka nilai Output Analog akan berubah sesuai dengan kondisi kadar air dalam tanah.

- Basah : tegangan output akan turun
- Kering : tegangan output akan naik
- Kelembaban tanah melebihi dari nilai ambang maka led akan padam
- Kelembaban tanah kurang dari nilai ambang maka led akan menyala
gambar grafik

12. Sensor pH
Setelah sensor yang direndam bersentuhan dengan cairan, kaca pH khusus akan membentuk lapisan gel yang sensitif. Potensi dihasilkan dari elektroda pengukuran berdasarkan aktivitas ion hidrogen di sekitar lapisan gel. Selanjutnya, elektroda referensi internal harus digabungkan secara elektrik dengan larutan yang diukur. Hal ini dilakukan melalui sambungan cair. Persimpangan tersedia dalam berbagai bentuk berdasarkan jenis sensor (Contoh: keramik, lubang terbuka, PTFE). Potensial dari masing-masing elektroda ini penting untuk menghitung nilai pH yang diukur. Pemancar atau kepala sensor digital pintar melakukan penghitungan dan memberi Anda pembacaan pH.
Jika Anda tidak merawat komponen ini dengan benar, potensinya mungkin tidak dapat diandalkan, dan keakuratan sensor pH Anda akan menurun.
Grafik respon sensor:
.png)
13. Sensor Touch

Digital Touch Sensor inilah salah satu saklar modern. Digital Touch Sensor merupakan sebuah modul sensor yang berfungsi seperti tombol/saklar, namun cara penggunaanya hanya perlu dengan menyentuhnya menggunakan jari kita. Pada saat disentuh oleh jari, sensor akan mendeteksi aliran arus listrik pada tubuh manusia karena tubuh manusia dapat mengalirkan listrik. Data akan berlogika 1 (HIGH) saat disentuh oleh jari dan akan berlogika 0 (LOW) saat tidak disentuh.
Digital touch sensor dapat digunakan untuk switching suatu alat atau sistem. Seperti untuk menghidupkan lampu, menghidupkan motor, menyalakan sistem keamanan, dan lain-lain.
Grafik respon sensor :

Digital touch sensor dapat digunakan untuk switching suatu alat atau sistem. Seperti untuk menghidupkan lampu, menghidupkan motor, menyalakan sistem keamanan, dan lain-lain.

- Pin EN (Enable) : EN1.2, EN3.4. Berfungsi mengaktifkan driver motor. Selain itu pin ini juga berfungsi untuk menerima sinyal PWM sebagai penentu kecepatan motor.
- Pin In (Input) : 1A, 2A, 3A, 4A. Berfungsi untuk menentukan arah perputaran motor DC
- Pin Out (Output) : 1Y, 2Y, 3Y, 4Y. Berfungsi sebagai keluaran driver yang dihubungkan ke motor DC
- Pin VCC1. Berfungsi sebagai sumber tegangan logic pada driver motor. Umumnya 3.3v atau 5v
- Pin VCC2. Berfungsi sebagai sumber tegangan yang akan digunakan untuk memutar motor DC. Umumnya 4.5-36v
- Pin GND (Ground) untuk dihubungkan ke mikrokontroller dan sumber tegangan motor sebagai tegangan referensi.
Menentukan arah putar Motor DC pada IC L293D
Mengendalikan Motor DC
Untuk memiliki kendali penuh atas motor DC kita harus mengontrol kecepatan dan arah putarannya. Hal ini dapat dicapai dengan menggabungkan kedua teknik ini.
- PWM – untuk mengontrol kecepatan
- H-Bridge – untuk mengontrol arah putaran
PWM – untuk mengontrol kecepatan
Kecepatan motor DC dapat dikontrol dengan mengubah tegangan inputnya. Teknik umum untuk melakukan ini adalah dengan menggunakan PWM (Pulse Wide Modulation).
PWM adalah suatu teknik dimana nilai rata-rata tegangan input diatur dengan mengirimkan serangkaian pulsa ON-OFF.
Tegangan rata-rata sebanding dengan lebar pulsa yang dikenal sebagai Duty Cycle .
Gambar di bawah menunjukkan teknik PWM dengan siklus kerja dan tegangan rata-rata yang berbeda.

H-Bridge – untuk mengontrol arah putaran
Arah putaran motor DC dapat dikontrol dengan mengubah polaritas tegangan masukannya. Teknik umum untuk melakukan hal ini adalah dengan menggunakan jembatan-H.Rangkaian H-bridge terdiri dari empat saklar dengan motor di tengahnya membentuk susunan seperti H.
L293D paling sering digunakan untuk menggerakkan motor, tetapi juga dapat digunakan untuk menggerakkan beban induktif apa pun seperti solenoid relai atau transistor daya switching besar.Ia mampu menggerakkan empat solenoid, empat motor DC satu arah, dua motor DC dua arah, atau satu motor stepper.IC L293D memiliki rentang suplai 4,5V hingga 36V dan mampu menghasilkan arus keluaran puncak 1,2A per saluran, sehingga bekerja sangat baik dengan sebagian besar motor kami.
Referensi :
Hasil analisis kimia yang meliputi kadar air, abu, protein, lemak dan karbohidrat menunjukan bahwa perlakuan H1 (hari pertama) memiliki kadar air tertinggi sedangkan perlakuan H3 (hari ketiga) memiliki kadar abu, protein, lemak, dan karbohidrat tertinggi. Dengan kisaran suhu dalam ruang 42,38 °C - 42,89 °C dan kelembaban udara (RH) 40%.
5. Percobaan [Kembali]
- Download library yang diperlukan pada bagian download dalam blog.
- Buka proteus yang sudah diinstal untuk membuat rangkaian.
- Tambahkan komponen seperti Arduino, sensor, dan perangkat lainnya lalu susun menjadi rangkaian.
- Buka Arduino IDE yang sudah diinstal.
- Di Arduino IDE, pergi ke menu "File" > "Preferences".Pastikan opsi
- "Show verbose during compile" dicentang untuk mendapatkan informasi detail saat kompilasi.
- Salin kode program Arduino pada blog kemudian tempelkan program tadi ke Arduino IDE.
- Kompilasikan kode dengan menekan tombol "Verify" di Arduino IDE.
- Cari dan salin path file HEX yang dihasilkan selama proses kompilasi.
- Kembali ke Proteus dan pilih Arduino yang telah Anda tambahkan di rangkaian.
- Buka opsi "Program File" dan tempelkan path HEX yang telah Anda salin dari Arduino IDE.
- Jalankan simulasi di Proteus.



- Master










A. KONTROL KELEMBABAN TANAH TANAMAN
Untuk Sensor Soil Moisture, resistansi yang menjadi acuan adalah 40-50% dimana saat resistansi diatas 50% mengindikasikan tanah lembab, sedangkan resistansi dibawah 40% mengindikasikan tanah kering.
Kondisi 1 : Tanah Kering
Kondisi ini terjadi ketika sensor soil mosture mendeteksi besar kelembapan yang terbaca sebesar 39%. Dimana pada saat kondisi ini terjadi maka output berupa LCD akan menampilkan kondisi "Tanah : Kering" dan akan menyalakan LED Merah sebagai indikator penanda bahwa kondisi tanah kering.
Kondisi 2 : Tanah Lembab
Pada kondisi ini sensor Soil mosture akan mendeteksi tanah lembab yang mana kelembapan yang terbaca pada sensor Sosil mosture sebesar 51%. Dimana pada saat kondisi ini terjadi maka output berupa LCD akan menampilkan kondisi "Tanah : Lembab" dan akan menyalakan LED Hijau sebagai indikator penanda bahwa kondisi tanah kering.
B. PEMBERIAN AIR OTOMATIS PADA TANAMAN
Pada pemberian air otomatis kita menggunakan sensor touch dimana sensor ini akan aktif apabila mendeteksi adanya sentuhan pada sensor touch yang terletak di bagian luar greenhouse, dimana pada saat kita menyentuh sensor touch maka air akan otomatis disemprotkan ke tanaman.
Pemberian air otomatis ini akan diberikan ketika, kondisi yang tebaca pada LCD "Kondisi Tanah : Kering" maka kondisi ini berarti tanaman membutuhkan tambahan air untuk tumbuh.
C. SISTEM PENGATURAN PH OTOMATIS
Pada sistem pengaturan ph otomatis, kita menggunakan sensor ph meter dimana sensor Ph meter dapat mendeteksi ph dari tanaman tersebut.
Sensor Ph disini berfungsi untuk mendeteksi nilai ph air yang ada pada tanaman hidroponik yang ada didalam greenhouse. Dimana untuk kondisinya sendiri ph yang baik untuk tanaman ialah antara 3,5-5. Jadi pada saat sensor ph mendeteksi nilai ph air <3 maka akan dapat memutar motor servo ke kiri untuk menambahkan cairan basa. Sedangkan pada saat ph>5 maka motor servo akan berputar kekanan yang menandakan penambahan cairan asam. LED biru akan hidup apabila ph tanaman hidroponik tidak sesuai dan LED kuning akan hidup apabila ph dari tanaman hidroonik tidak sesuai yaitu diluar rentan ph 3,5-5.
D. TERDETEKSI ADANYA API PADA GREENHOUSE
Pada sistem pencegehan kebakaran pada greenhouse, kita menggunakan sensor flame yang dapat mendeteksi kebakaran pada greenhouse.
Sensor flame disini berfungsi untuk mendeteksi adanya api didalam greenhouse. Jadi pada saat sensor flame mendeteksi adanya api pada greenhouse maka akan menyebabkan buzzer penanda alarm kebakaran akan menyala, sehingga pemilik greenhouse akan mengetahui adanya api pada greenhouse miliknya.
E. SISTEM PENGATURAN ATAP OTOMATIS DIRUMAH TANAMAN
Pada sistem pengaturan Atap otomatis, kita menggunakan UV Sensor dimana UV Sensor dapat mendeteksi banyaknya cahaya matahari yang masuk ke sensor tersebut. UV Sensor ini diletakkan diatap rumah tanaman.
Ketika sensor UV mendeteksi adanya cahaya matahari dan membaca tegangan sebesar 2 Volt, maka hal tersebut akan mengakatifkan sensor sehingga akan menyebabkan atap lapisan anti UV akan terbuka sedangkan ketika sensor UV membaca tegangan kecil dari 2 maka akan menyebabkan atap lapisan anti UV akan tertutup.
- video teori arduino
g. Download File[Kembali]



{kind=link}
Komentar
Posting Komentar